Let’s do a “Hello World!” job. You can get the files for this example at the “Downloads” page.
Prepare for the job
First, we need to put some parts down. If you haven’t yet done so, put some guide lines on your table; you can download ruler sticker PDFs at the downwloads section and use those. Put double side tape beside these and place part strips beside the rulers. The example uses 0805 and 0603 resistors. I placed these positions I named X1 and x2:
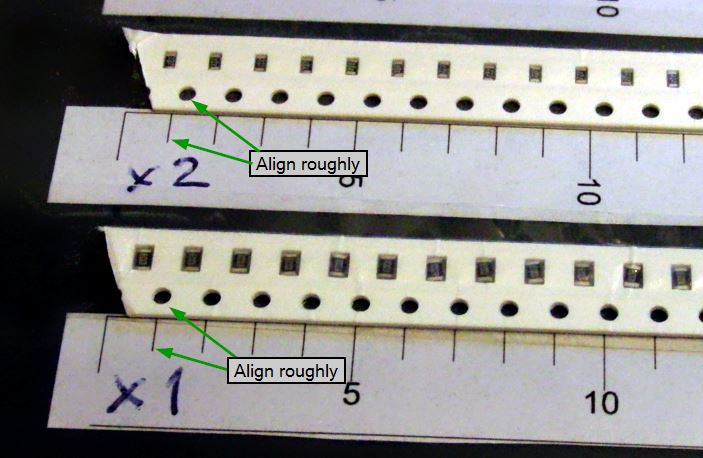
Align the reference holes approximately to the first part tick, press the strips don to the double sided tape and remove the cover tape.
Please refer to the Setup Tape Positions page for further information.
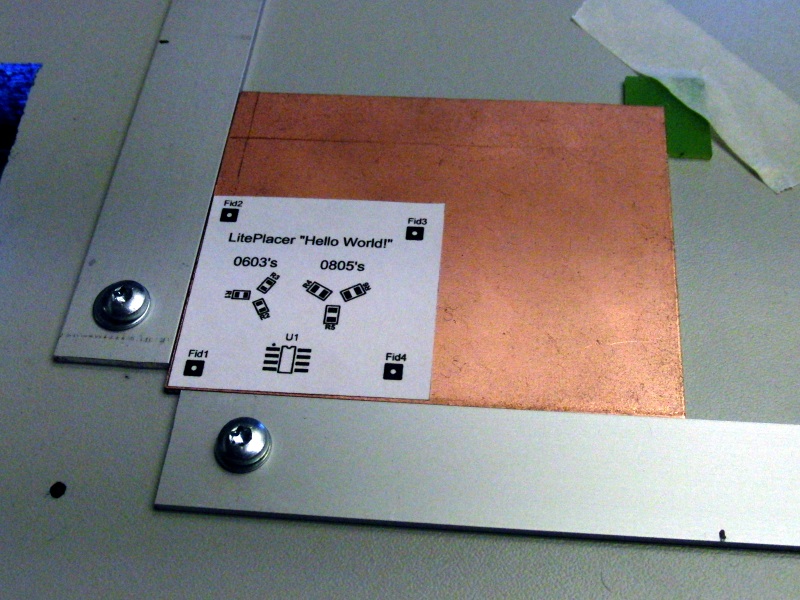
We don’t need to manufacture a real PCB for this test, a mockup is just fine. Print the Hello World PCB image PDF, making sure your printer does not do too much scaling on the image; the nominal size is 42.5mm x 41mm. Cut out the image and attach it to a blank PCB piece. A spray-on post-it glue is great for this, available at you local office supplies store. Put some on your printout as well to simulate the soldering paste stickiness. Put the board mockup to your PCB jig and secure the placement. An L shaped piece of circuit board and some masking tape is sufficient for this purpose:
I assume that you have already done the calibrations and nozzle setup.
Turn machine on
Turn power on to the machine and start the control program. You see the communications in the log window and the values stored in the TinyG filled at the Basic Setup page. By now, the values should be set up correctly.
Define tapes
If you haven’t yet defined the positions for the tapes, you need to do this now. Select the “Tape Positions” tab. (For instructions about how to jog (=move manually) the machine, please see the “Basic Setup” page.) Jog the machine to the reference hole of first tape and click “Add”:
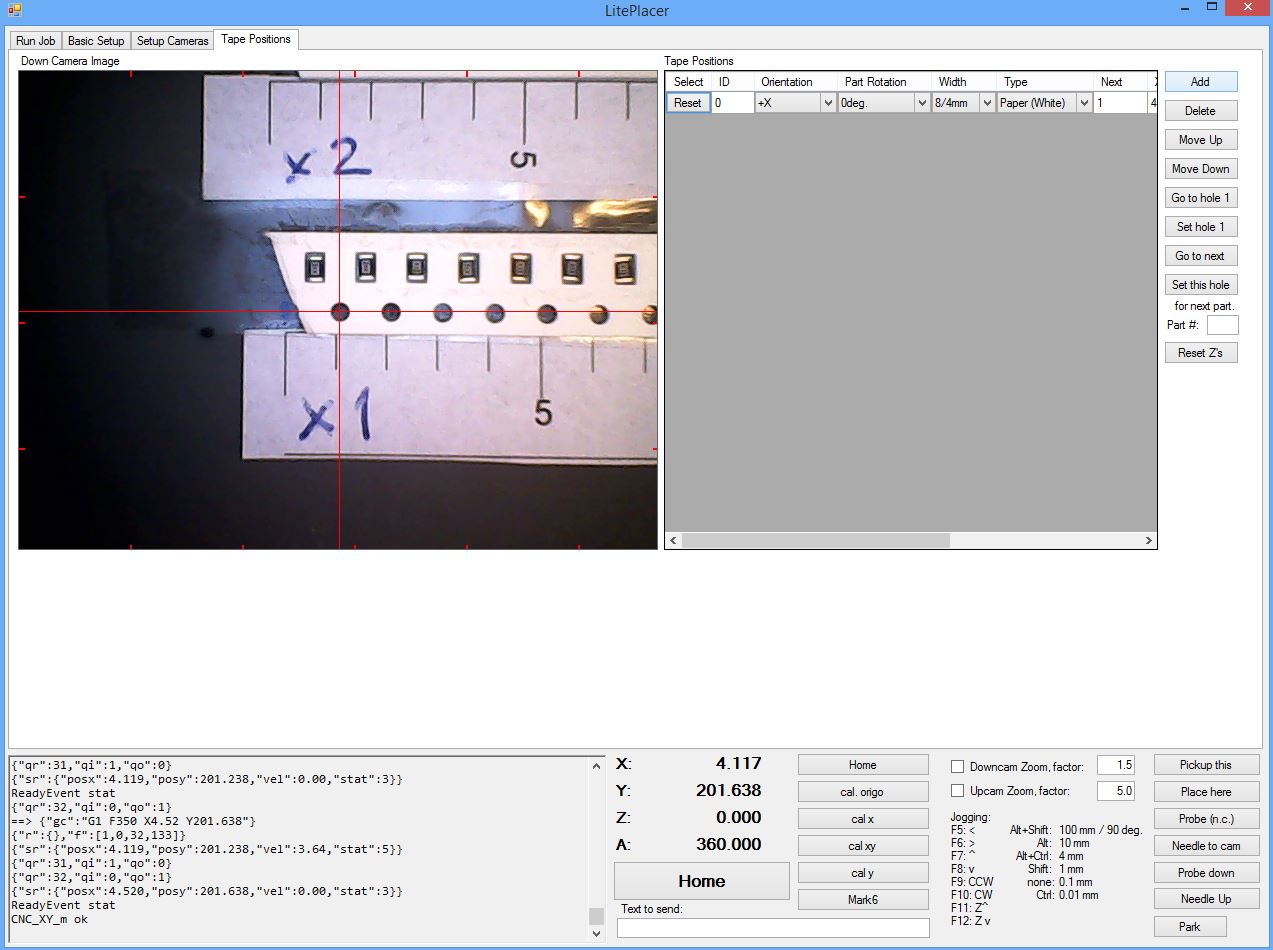
(Click for a larger image) Here, the tape is in +X orientation (next part is in positive X direction), part orientation is 0 degrees, the tape width is 8/4mm (8mm wide, parts are 4mm apart) and tape type is “Paper”. Give this a better name (ID), such as “x1: 0805”. In real work, it is wise to include the values as well, such as “x1: 300R, 0805”.
Repeat for the other tape as well. Your screen should now look something like this:
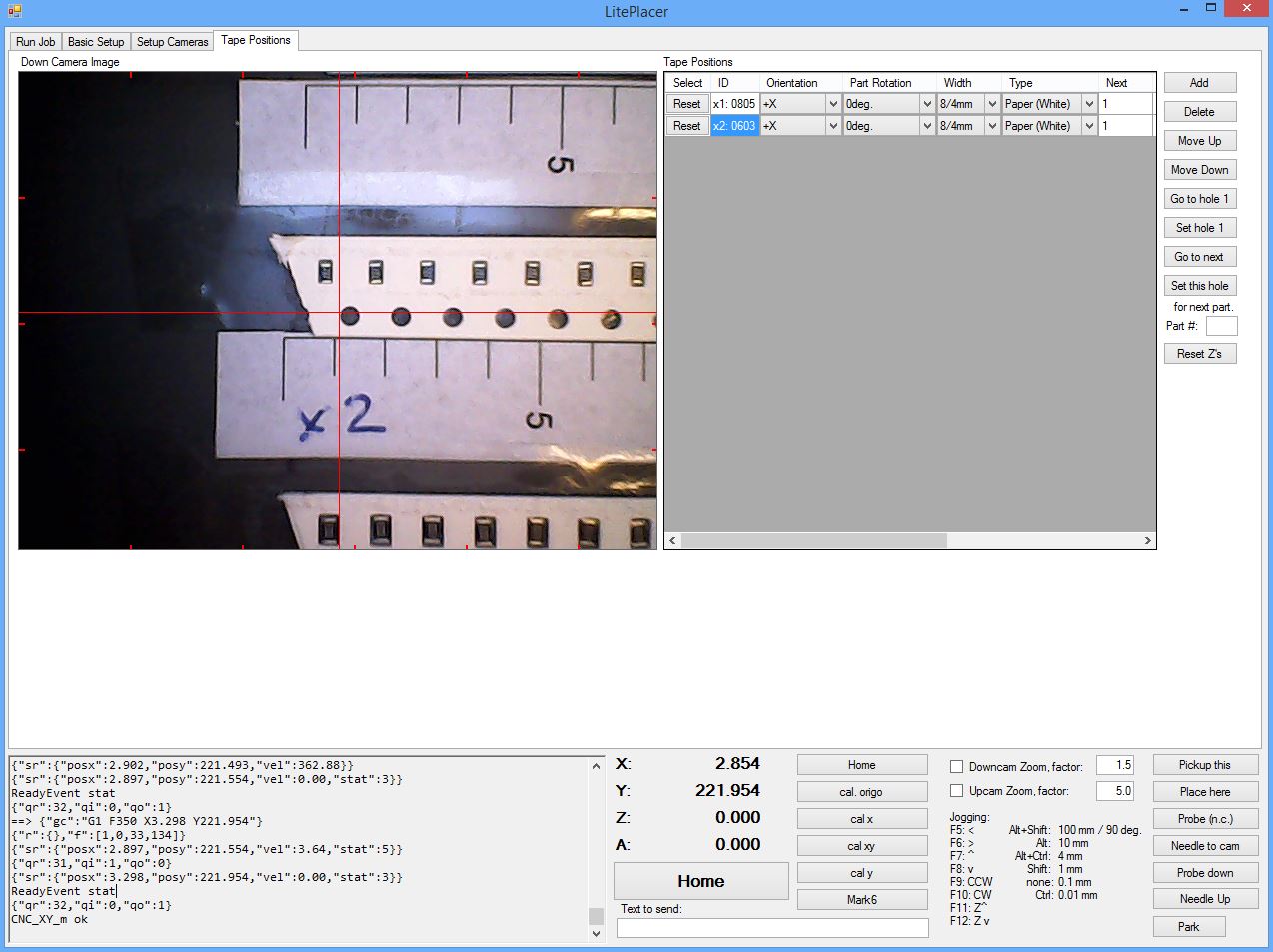
Note, that the reference hole indication does not need to be precise: When parts are picked up, the system uses the camera to look for the exact location of the hole.
Load data
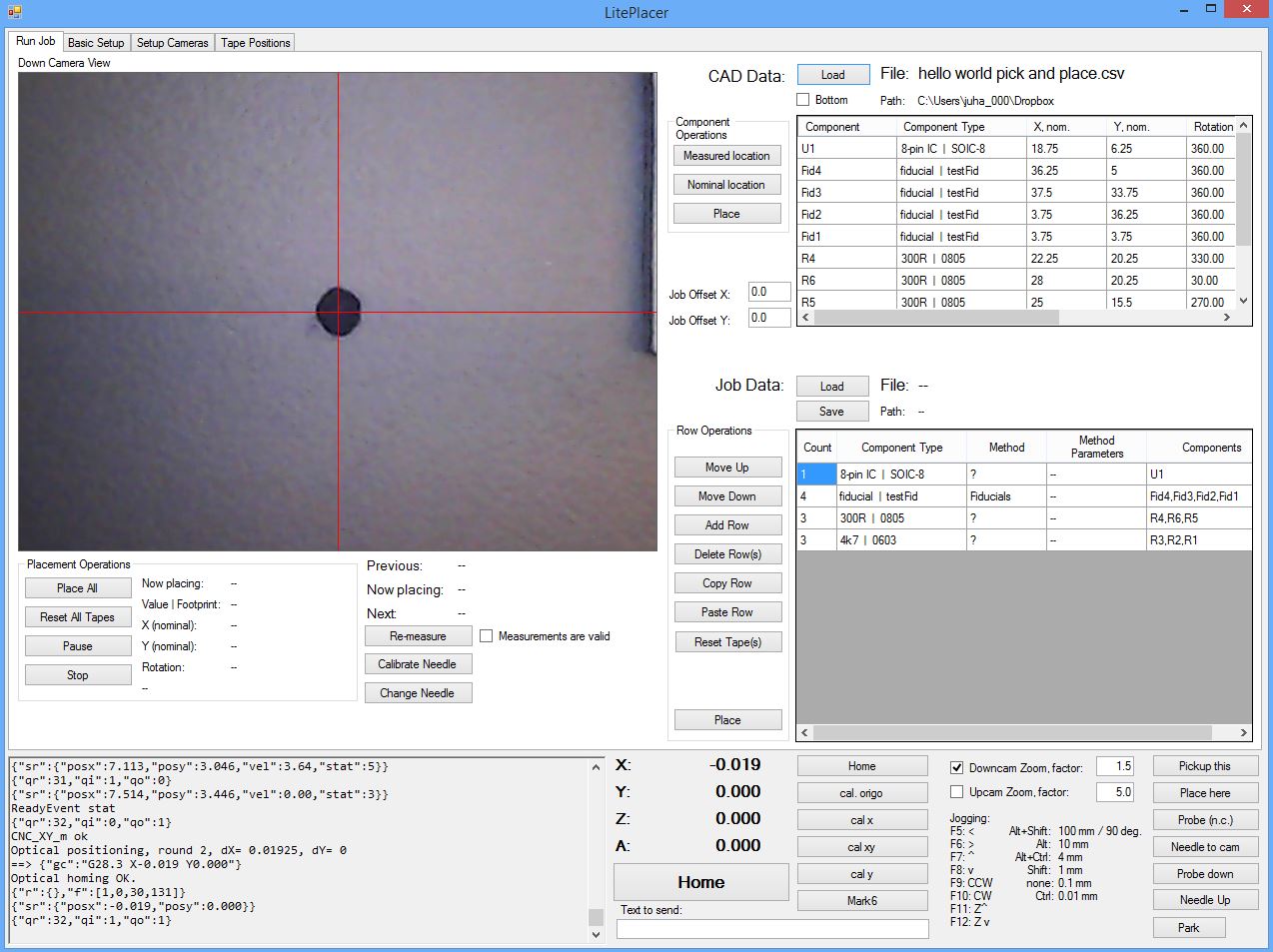
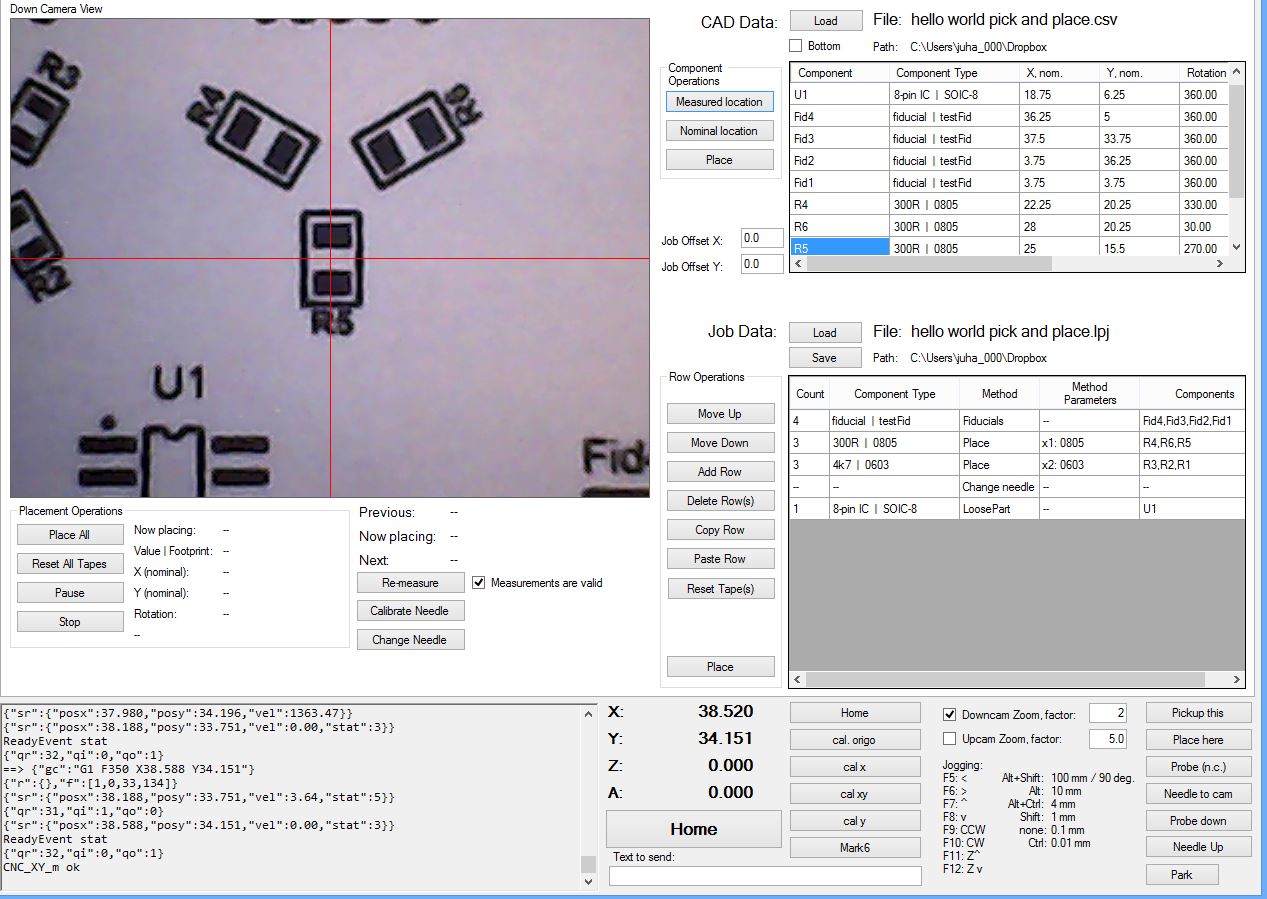
Select the “Run Job” tab. Click the “Load” button at the “CAD Data” section on top of the page and select the file “hello world pick and place.csv”. The pick and place data is read in and the Job Data table is filled with a summary. The fiducials are named as Fid1..Fid4, so the system automatically recognizes them. Please see the Input File Format page for the requirement of the pick and place file. The result is like this:
We are going to place the resistors from the tape strips and the IC as a loose part. First, Click the Method cell on the SOIC-8 part:
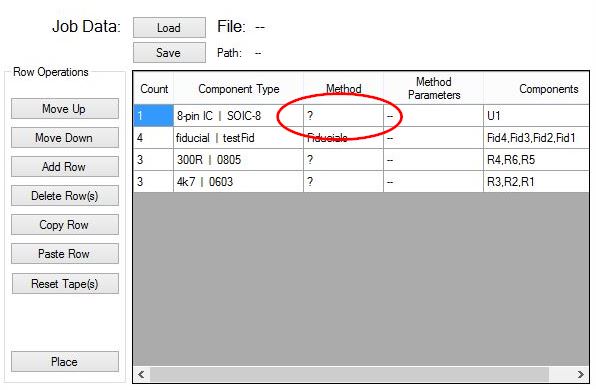
Select Loose Part Pickup on the dialog that pops up. We want to first place the resistors, then place the IC. Use the “Move Down” button to move this row to the bottom.
Click the Method cell on the 0805 resistor row, and select “Place”. Click the “Method Parameters” cell. This gets you the tapes table; click the “Select” button on the 0805 resistor row (in this example, x1). Repeat for the 0603 resistors.
To save your work so far, click “Save” button above the table. LitePlacer job data files are of type .lpj (LitePlacer Job). If a file with the same name but with .lpj extension is found at the same directory as the pick and place file, it is automatically loaded when the pick and place file is loaded. Of course, you can load a job file manually with the “Load” button.
Check Some Locations
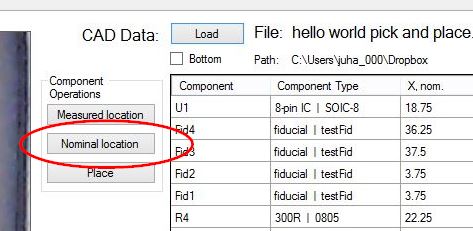
At this point, you could just press the “Place All” button, but let’s get familiar with location functions. These are handy to double check that your board and your data match. Click any cell on the the Fid4″ row on the CAD Data table and click the “Nominal Location” button:
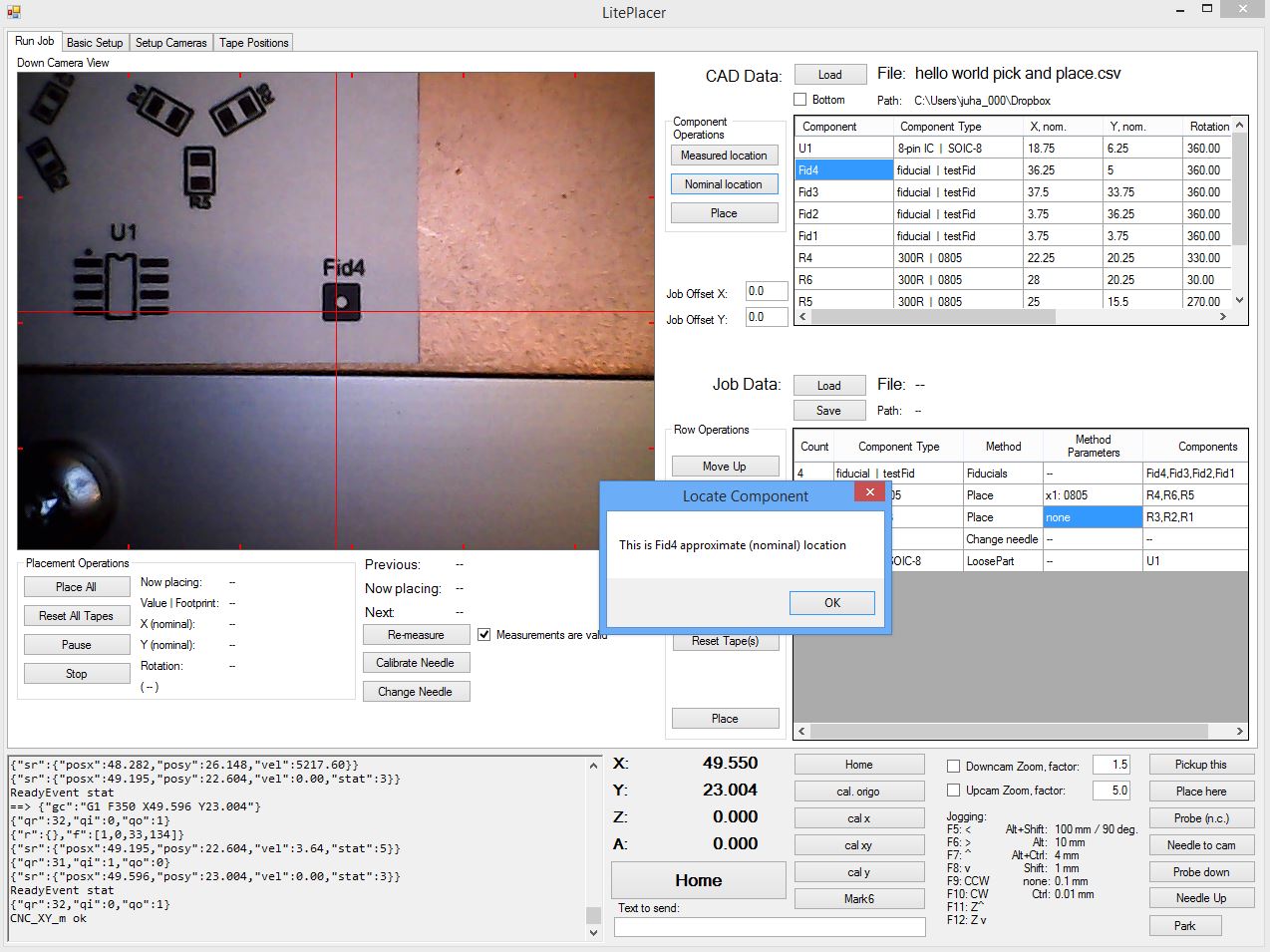
The machine moves so, that the Fid4 is located approximately in the center. Your PCB positioning needs only be accurate enough that the circle of the ficucial mark is the closest circle to the center:
Next, select some other part, such as R5, and press “Measured Location” button. As the part locations are not yet measured, the system asks for confirmation:
Click “Yes” or the equivalent in your language. The system looks at each fiducial, measures their exact position in machine coordinates and calculates the machine coordinate location of each component and shows the position of R5. For the screenshot, I turned zoom on for the camera. (Note, that for performance reasons, the video processing is not on at all steps):
Run Job
You could place individual components by clicking “Place” button at the CAD Data section. You can also place one row form the job by clicking “Place Row” in the Job Data section. You can also run partial job by selecting just some rows on the Job Data section and clicking “Place” at the bottom (Row operations). This “Hello World” jos is simple enough that we’ll run all of it.
Click “Place All”, below the camera image:
The system now runs the job; in other words, goes through the Job Data table staring from top, skipping fiducials and otherwise, executing the method on each row. So, it first picks and places the six resistors from the two tapes, changing the nozzle if needed.
As we said the IC is a loose part, the machine then goes to the pickup position and asks you for the part:
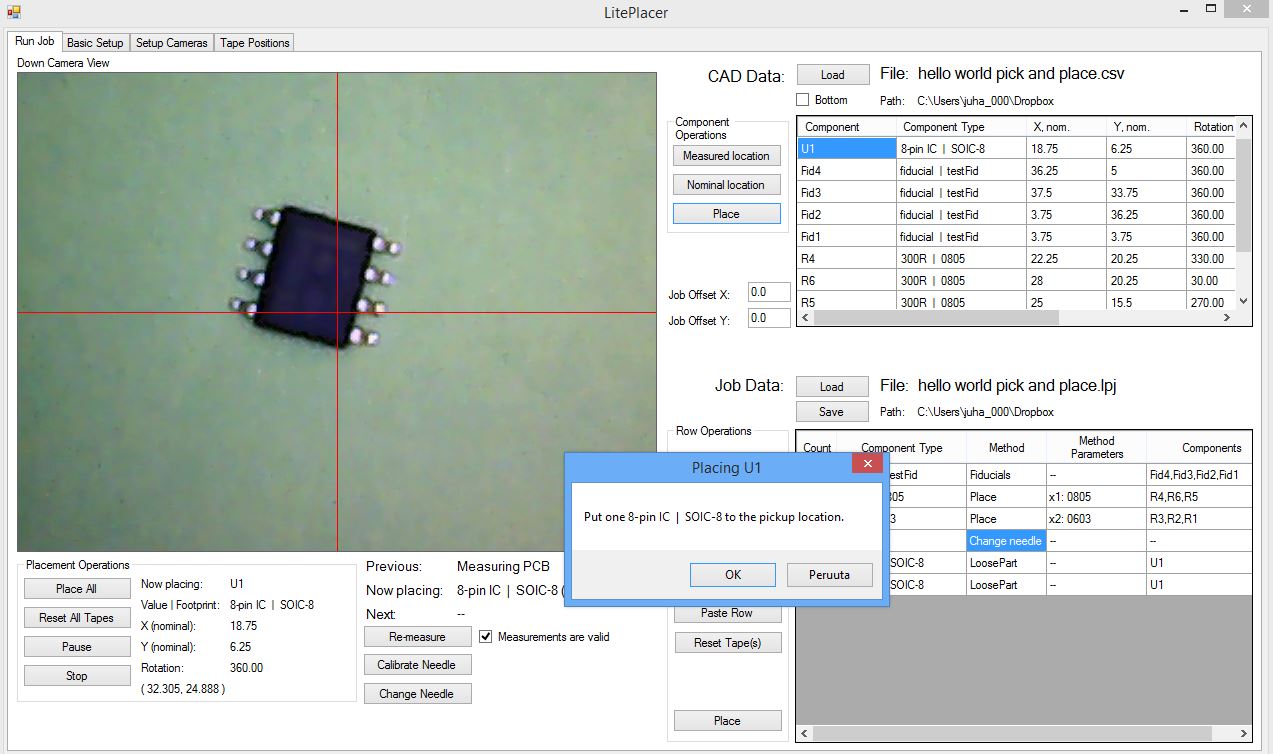
Place an SOIC-8 part to camera view, approximately in 0 degree orientation. As you can see, you don’t need to be too precise with this. Click “OK”.
The machine finishes the job by picking up the IC and placing it on the PCB. It then moves to the Park location and announces the job well done:
Your results should be something like this:
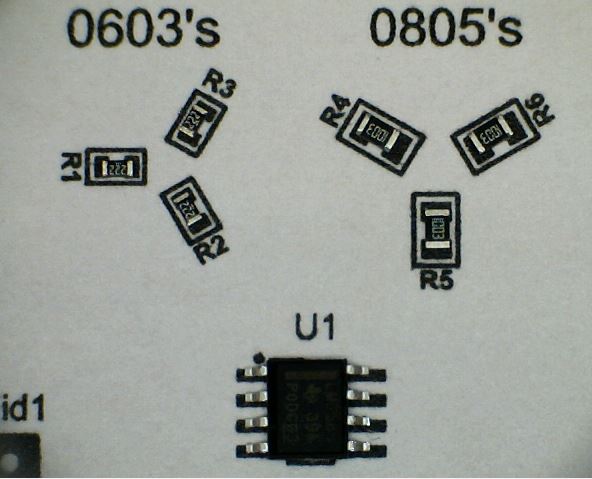
Congratulations! You have now built your own pick and place machine and have run the first job with it. Your machine is now ready to use. You might still want to prepare some more mockups and familiarize yourself to the operation and capabilities of your machine.